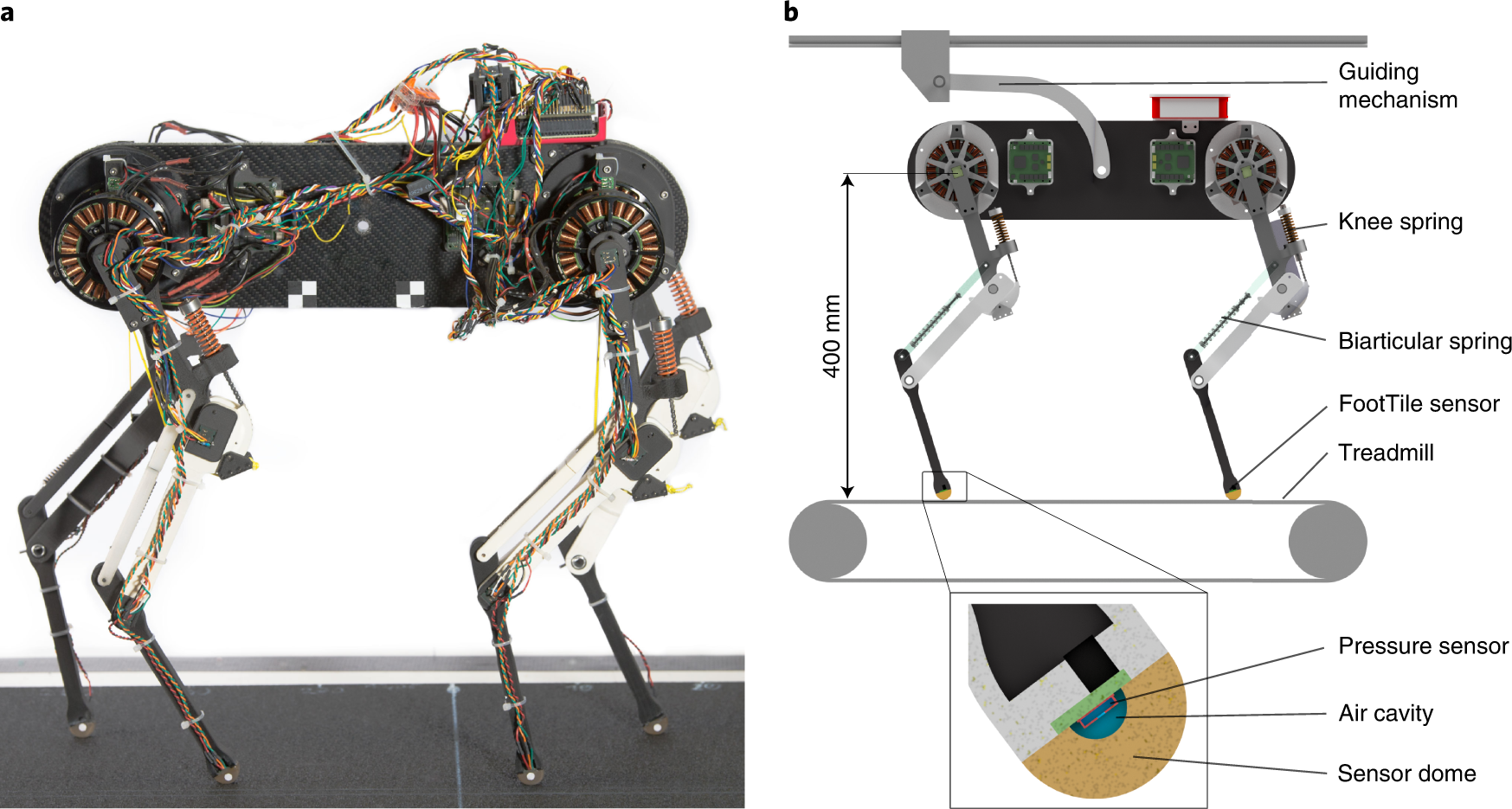
The two-segment leg has a torque-controlled actuator at the hip, and a
5 (203) · $ 20.99 · In stock


Leg Mechanism of LOLA
Adaptive RBF neural network-computed torque control for a
Sensors, Free Full-Text

Torque control of an active elastic transfemoral prosthesis via

The two-segment leg has a torque-controlled actuator at the hip
Learning plastic matching of robot dynamics in closed-loop central

Felix RUPPERT, Ph.D Student, Master of Science, Max Planck Institute for Intelligent Systems, Stuttgart, IS, Dynamic locomotion group

Sensors, Free Full-Text

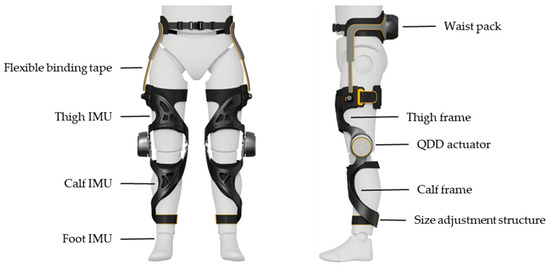
Frontiers A Wearable Soft Robotic Exoskeleton for Hip Flexion

Actuators, Free Full-Text

Slack-based tunable damping leads to a trade-off between

Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places

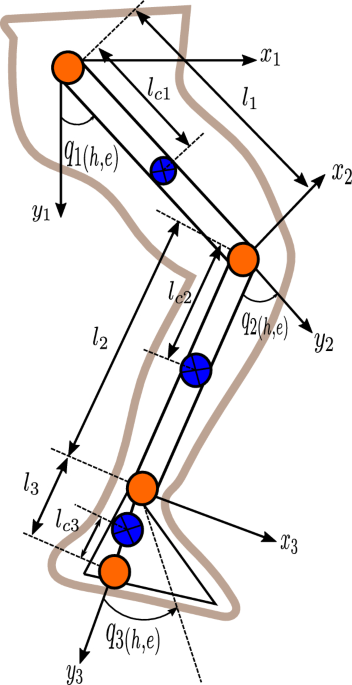
Simplified scheme for the considered lower-limb segments











