- Home
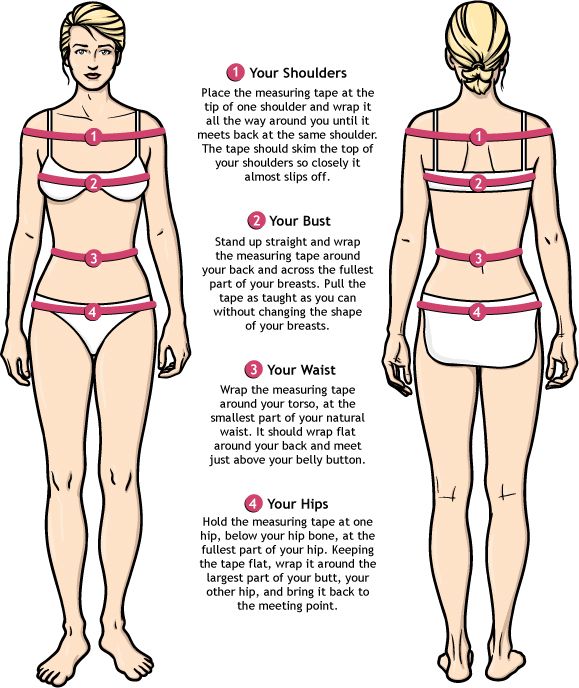
- skim duplicate 2 piece
- How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
4.5 (392) · $ 9.00 · In stock

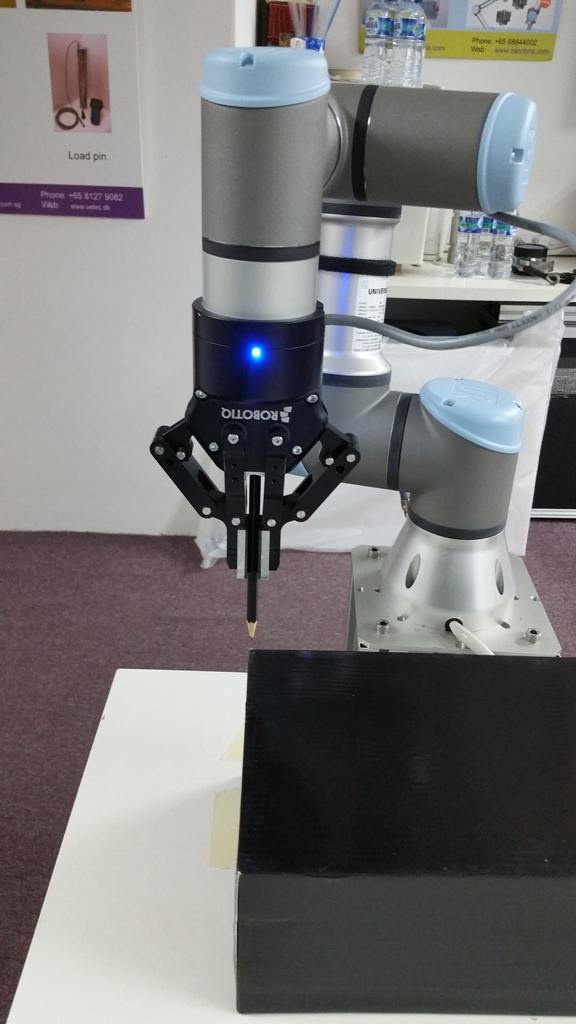
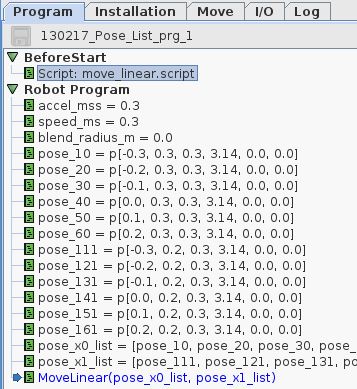
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

Move with Offset - Product Wishlist - Universal Robots Forum
Planes and position variables 2 – UR Forum-Help-Q&A
Forum a HIT for UMMC's innovation efforts - University of Mississippi Medical Center
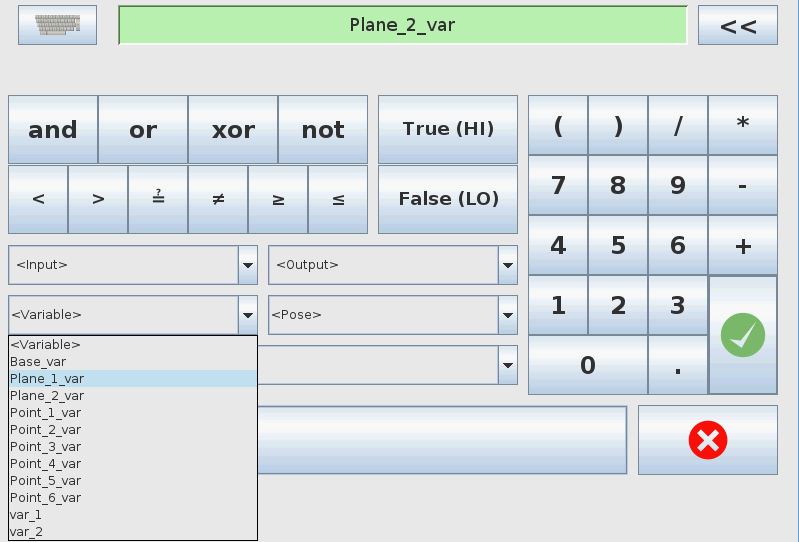
Planes and position variables 2 – UR Forum-Help-Q&A
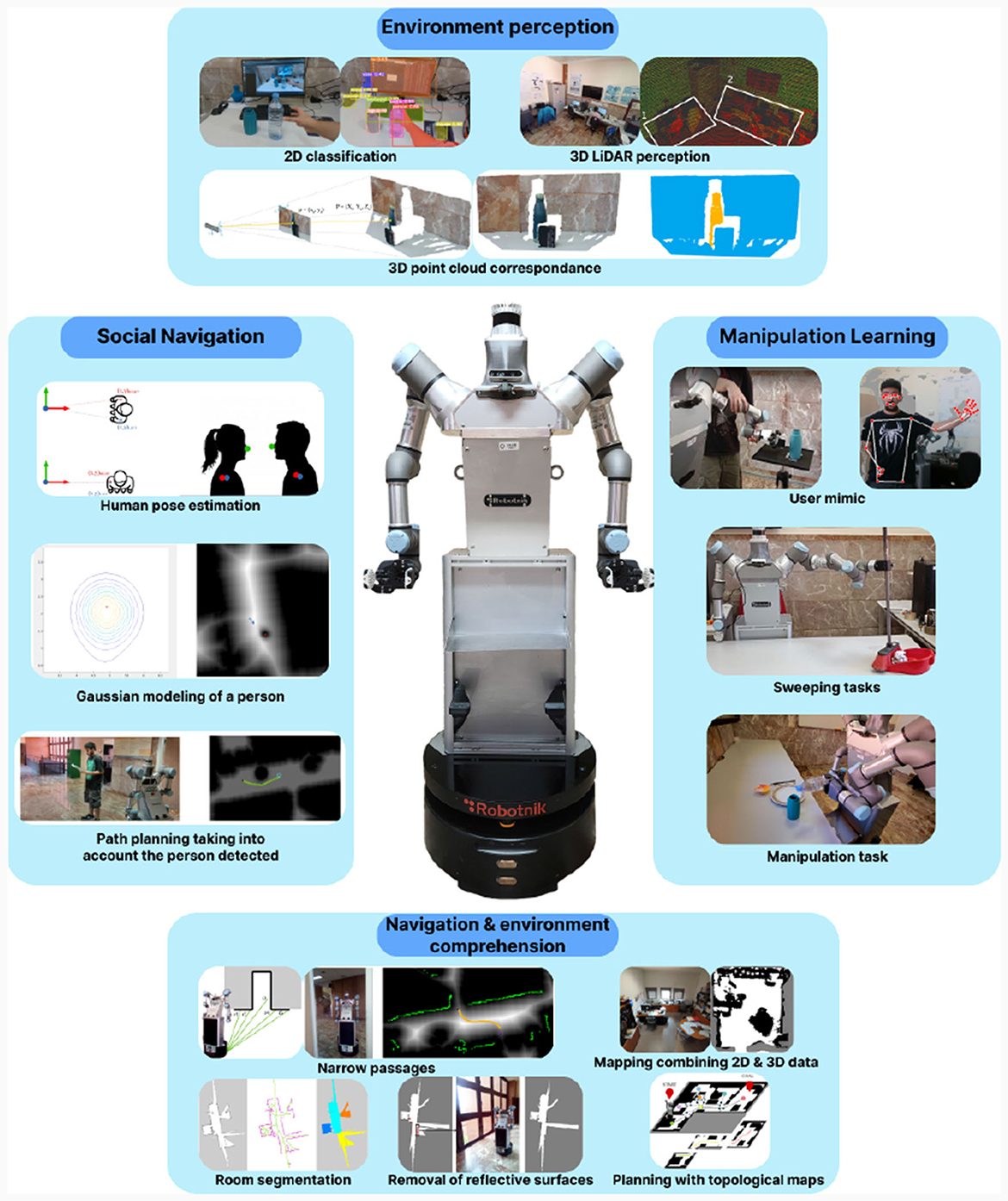
Frontiers ADAM: a robotic companion for enhanced quality of life in aging populations

ActiNav System Automates Flexible Machine Loading
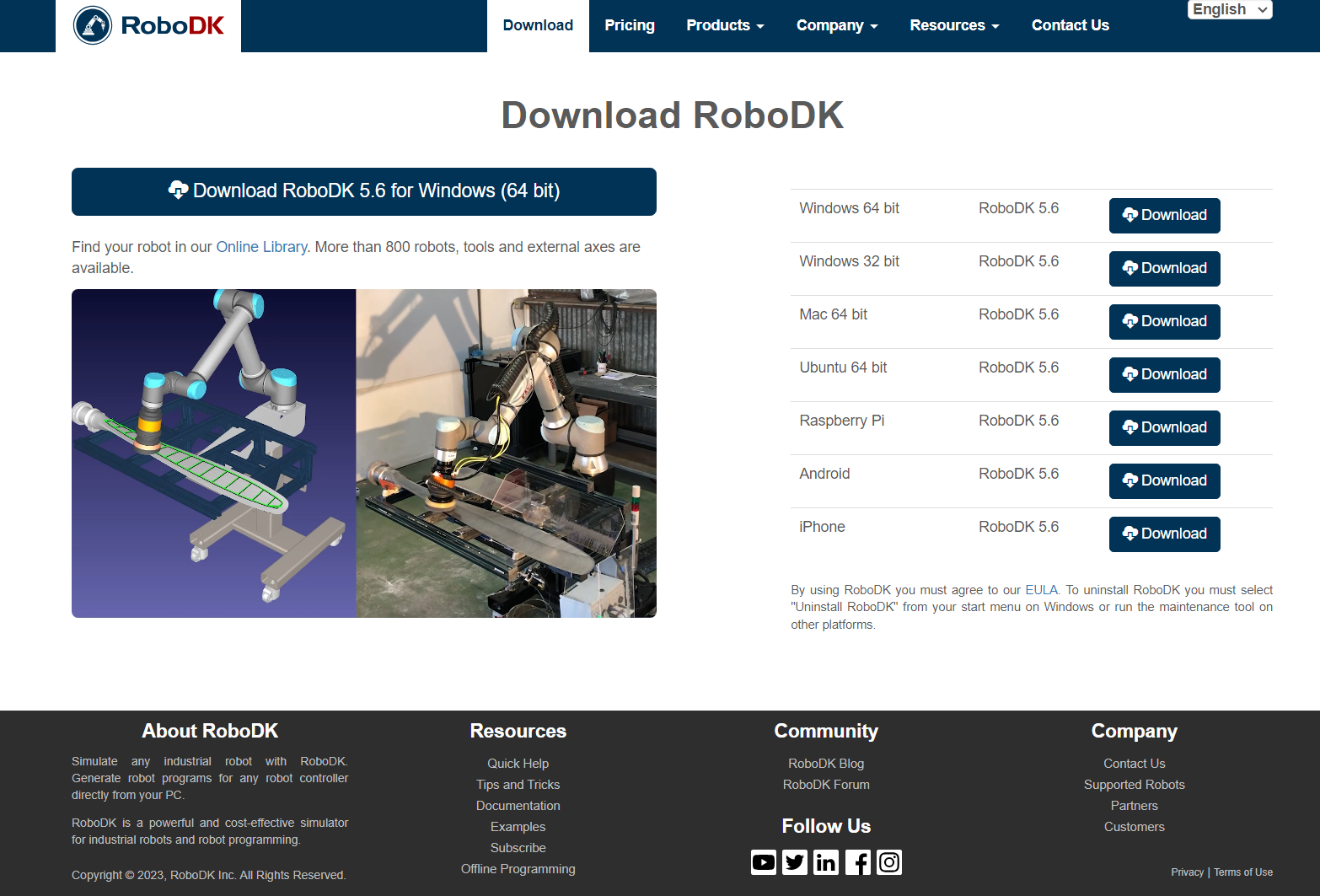
Basic Guide - RoboDK Documentation

An Agenda for Action: Alternative Processes for Negotiating a Killer Robots Treaty
UR Programming Functions: – UR Forum-Help-Q&A

Problem with getUserDefinedRobotPosition / joint positions - Technical Questions - Universal Robots Forum
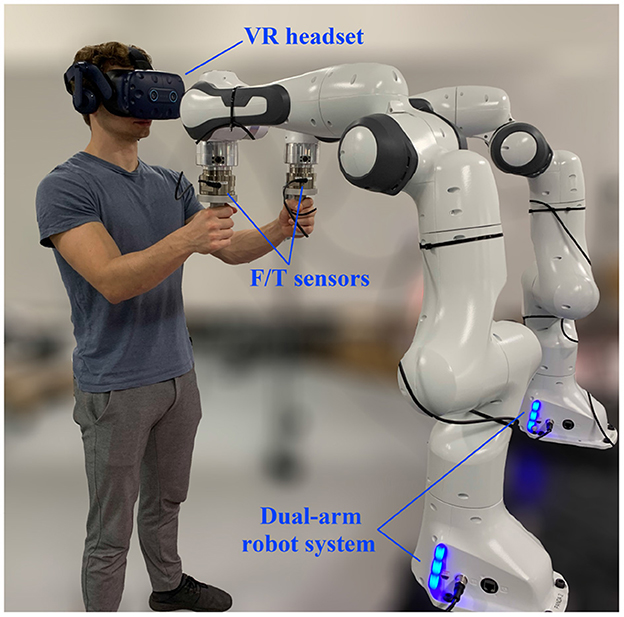
Frontiers PREDICTOR: A Physical emulatoR enabling safEty anD ergonomICs evaluation and Training of physical human-rObot collaboRation

3D CAD Package Tips – Page 2